|
Deliverable 2.1
Resource Goal/Behavior Description Framework
Agent-oriented approach has proven to be very efficient in engineering complex distributed software environments with dynamically changing conditions.
The efficiency of underlying modelling framework for this domain is undoubtedly of a crucial importance. Currently, a model-driven architecture has been the most popular and
developed for purposes of modelling different aspects of multi-agent systems, including behaviour of individual agents. UML is utilized as a basis for this modelling approach and
variety of existing UML-based modelling tools after slight extension are reused. This deliverable covers an ontology-driven approach to modelling agent behaviour as an emerging
paradigm that originates from the Semantic Web wave. The proposed approach aims at modelling a proactive behaviour of (web-)resources through their representatives:
software agents. In general, the underlying research puts efforts into investigation of beneficial features of ontology-based agent modelling in comparison with conventional
model-driven approaches.
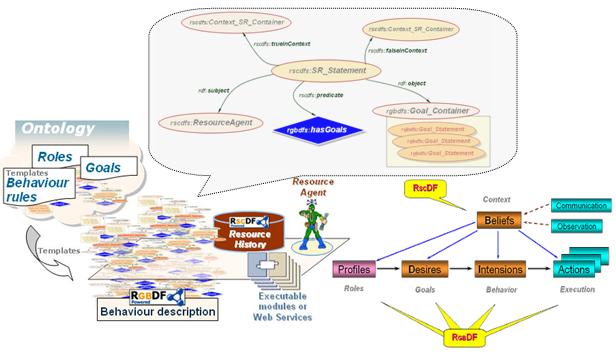
Approach of RG/BDF assumes concentrating all the goals, roles descriptions and templates of behavioural rules in ontology. The templates of behavioural
rules are described in a general way with a purpose to be applied to any particular agent. Such description requires utilization of a handy and flexible description schema (RG/BDFS-Lite),
which is the main result of this deliverable.
With software agents in mind we are focused just on the goal-driven behaviour. What is a goal-driven behaviour? Such behaviour means performing set of rules,
which are aimed for achievement of certain goal. In return, goal is a fact which does not exist in a description of the environment, and an agent aims at appearance of the fact. As a result,
we have a trio: behaviour which is driven by certain goal and which lies in performing actions following a set of behavioural rules. However, even having a rule base, which enables an
agent to achieve a goal, still extra information (environmental facts) is needed. This is because each rule has to have a sufficient condition. In our case a sufficient condition is a presence
of input data for action performing. Having the sufficient condition we should take into account necessary condition: presence of a goal along with a certain context (set of facts of the
environment) for performing the goal. Not all goals assume execution of unambiguous rule(s). Some goals can be represented by aggregation of more specific goals.
One more thing from a modelling paradigm that can be applied to an agent is an agent role. Agent role means aggregate of goals corresponding to a specific purpose
of the agent. Individual role does not assume a fixed set of activities, the set of the goals can be different even for the same role depending on the context. Such approach to the goal and
behaviour description brings a possibility for agent to be more autonomous. Through utilization of this approach agent can change its role, set of the goals corresponding to its purpose
depending on a condition of the environment. In other words, an agent can change its behaviour based on a context.
|
|
|









